Showing 1 to 12 of 17 results
New

Gemini 1200id
Multibeam Sonars
Depth rated 4000m

Gemini 1200ikd
Multibeam Sonars
DEPTH RATED 500M or 1000M

MicronGemini 720s
Multibeam Sonars
DEPTH RATED 300M or 750M

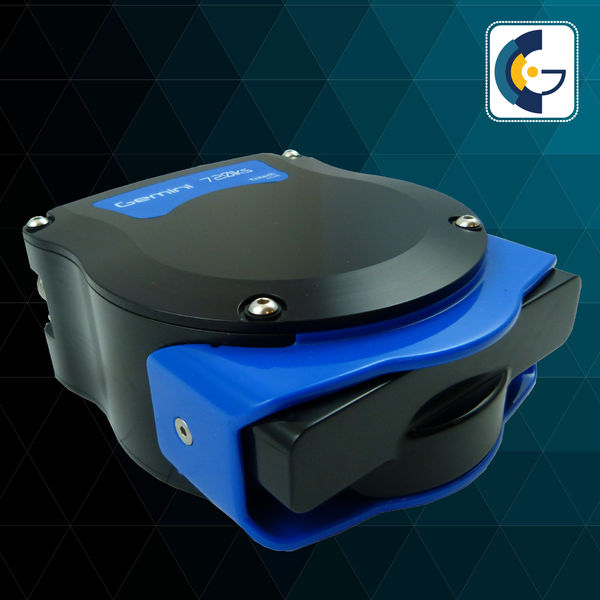
Gemini 720is
Multibeam Sonars
DEPTH RATED 1000M or 4000M
Gemini 720iks
Multibeam Sonars
DEPTH RATED 350M

Gemini NBI
Multibeam Sonars
Depth rated 4000m

Super SeaPrince
Mechanical Sonars

Super SeaKing DST
Mechanical Sonars

Gemini 620pd
Profiling Sonars
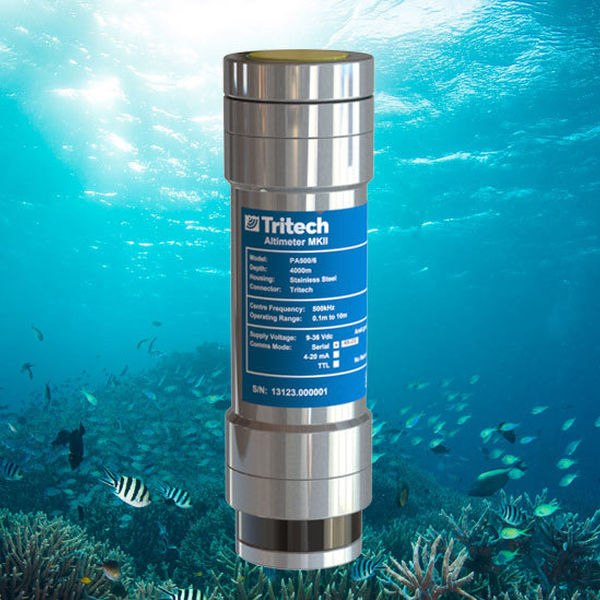
PA200 / PA500 Precision Altimeter MKII
Altimeters

Super Seaking Bathy
Survey Sensors

SeaHub
Control Units